PI Name & Affiliation:
Dr. Bikash Routh
Assistant Professor
School of Mechanical Engineering
Funding Agency: Science and Engineering Research Board (SERB)
Scheme: EEQ
Sanctioned Amount : Rs. 18,95,432
Duration of the Project: 3 years

Dr. Bikash Routh
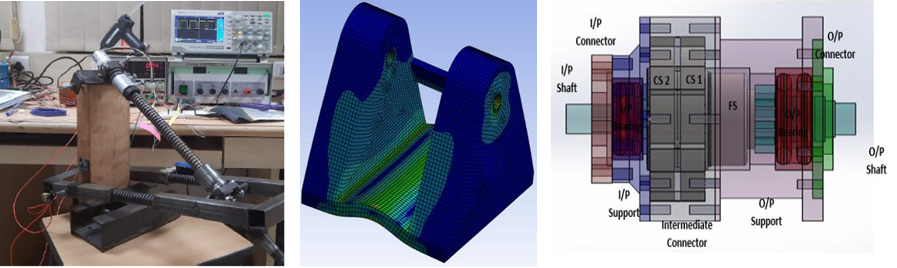
Graphical Abstract
Project Description
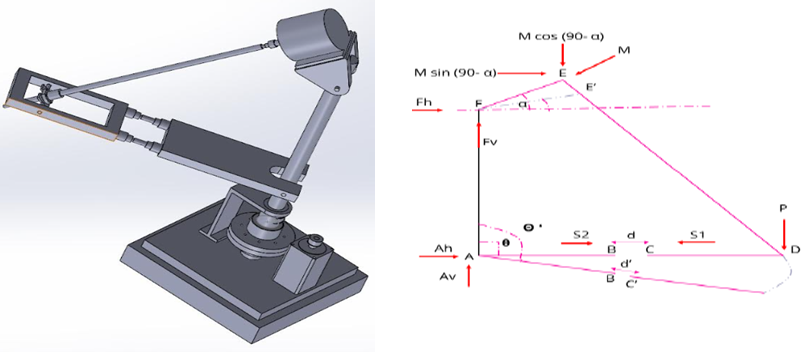
Actuators in industrial applications need to be robust and automated for high load carrying especially in difficult terrain. But the automation of robotic arms in unstructured environment is challenging task due to high computational requirement of precision force to overcome collision effect. Series elastic actuator with its unique working principle provides solutions to these challenges by adding elastic element such as spring to overcome impact/shock effect and rigid element such as gear for high torque transmission. Besides, there is need for IoT and digital twin of SEA unit which will help in distanced controlling and handling of shop floor situated in noisy, unsafe and unhealthy environment. In the present project an attempt will be made to improve performance of SEA unit by incorporating newly designed double helical harmonic drive to boost power transmission. Different possible compliance elements such as helical spring will be added to bring flexibility in structure along with adaptive control system and sensors in a sequence for proper controlling of unit in difficult environment. At last, both digital and physical model will be connected with IoT and digital twin concept will be investigated.
Products/Instruments/Results/Outreach Activities (Pictures)